Jeep Bot - Proof of Concept #1
I finished the 1st proof-of-concept for using the CAN-Bus data to control auxiliary relays. It worked great. Attached is a block diagram of what I used, and a longish video of how the testing went.
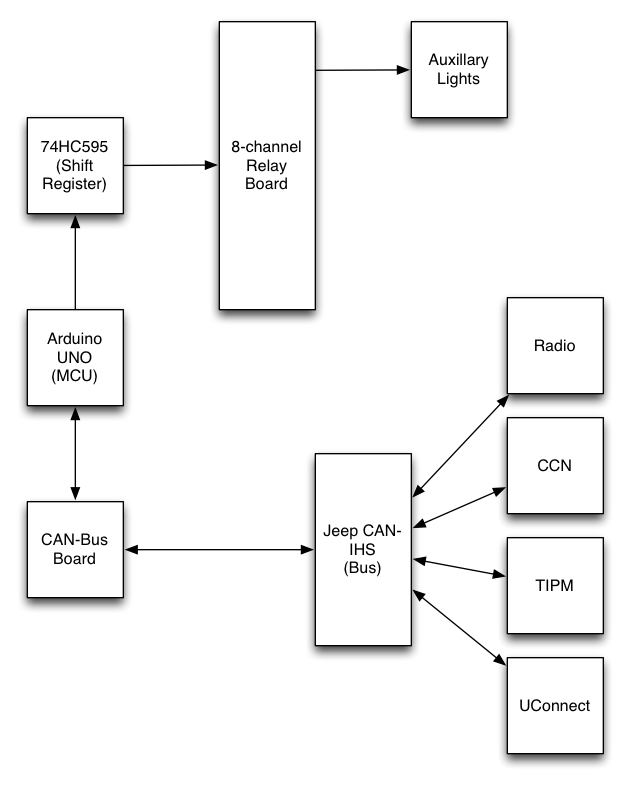 Jeep Bot Block Diagram
Jeep Bot Block Diagram
If you want to skip all the bench testing, the actual in-car testing happens at the 11:15 mark of the video.
Code for the demo can be found at https://github.com/dcgibbons/jeepbot/tree/poc1
A few hours after I finished, a bluetooth-low-energy board I ordered showed up. The next step will be to throw that on there so that I can use the smartphone to configure each switch and optionally control them by hand.
Each switch will have the following different possible control states:
- always on
- manual only
- on when interior lights are on
- on when high-beams are on
Right after that, I’ll start working on a prototype PCB and housing so I can start testing real versions of this system.
I’ll post the design, schematics and code in progress on my blog so anyone can offer feedback as it gets built.